Pose 1
This is the reference image for the first pose.
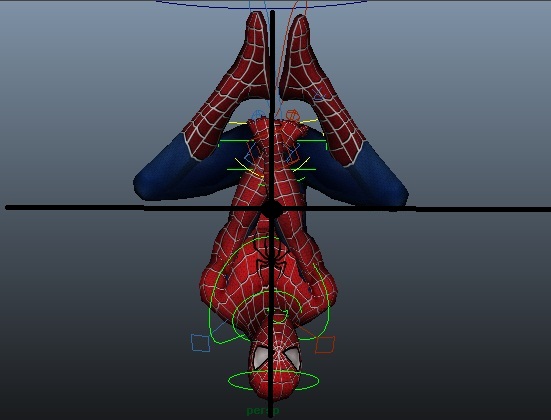
This is the front view of my final pose.
This is the side view of my final pose.
This is the center of gravity of the pose.
I had trouble getting a refined shape for the back and required multiple tries and comments from the teacher to acheive the shape in the picture. At the start, I had trouble with the user interface of the rig but after a few hours and some guidance from my classmates, I managed to understand the rig and use it with ease. Firstly, I concentrated on getting the fundamental pose by adjusting the back and legs. After attaining a decent posture, I concentrated on the arms and hands. Then I refined the posture and position of the arms and hands. One thing I could not get it right was the arms. The arms always look twisted and unnatural. That is a flaw in the final pose. I also learned that its is not a must to follow exactly what the picture shows but adjust it to make it look natural and bring out the intended feel. I also learned that I must consider if the posture and position is right. If the center of gravity is off, the pose is ruined.
Pose 2
This is the reference image of my second pose.
This is the final pose for my second pose.
For this pose, I did it quite smoothly except for the head which is not in the position the reference image shows and I could not figure out how to position the head in that manner. Other than that, this pose is decent and it captures the basic pose.
Pose 3
The figurine at the right is the reference image for the third pose.
The final pose for the third pose.
Again, like the second pose, this pose captures the basic pose but the head is not in the same position as the reference image. I have pondered over it for some time but for now I'll leave it as it is.
Overall, I think the poses are pretty decent but there is room for improvement.